
YesNoBot
This weekend I created the YesNoBot - a simple robot that is able to nod and shake its head.
I used two servo-motors a bunch of cablebinders, an arduino and a sheet of paper to create the bot. I wrote some build instruction after the video
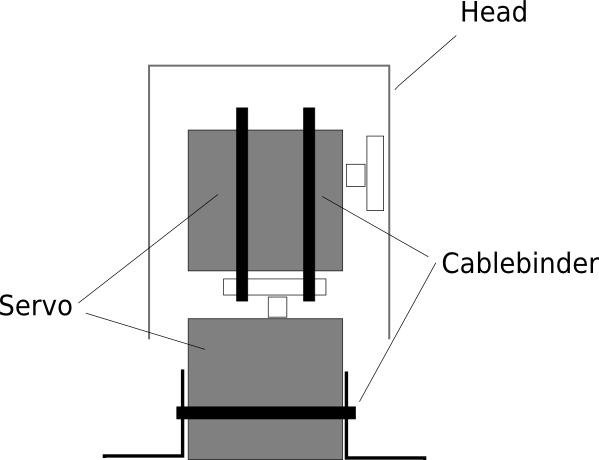
The servos get tied together using two cable binders as shown in the image below. I also used two brackets to stabilize the lower servo a bit. The head is cut from a sheet of paper and sticked to the upper servo using sticky tape.
The servos get connected to 5+ and Gnd on the arduino, the control lines are connected to pin 9 and pin 10. Here is the code that runs on the arduino to move the head.
#include <Servo.h>
Servo s1;
Servo s2;
int p1 = 0;
int p2 = 0;
void setup() {
s1.attach(9);
s2.attach(10);
s1.write(90);
s2.write(22);
}
void loop() {
for (int i=0; i<2; i++) {
for( p1 = 45; p1 < 135; p1++) {
s1.write(p1);
delay(5);
}
for( p1 = 135; p1 > 45; p1--) {
s1.write(p1);
delay(5);
}
}
s1.write(90);
delay(30);
for ( int i=0; i<2; i++) {
for (p2 = 45; p2 > 0; p2--) {
s2.write(p2);
delay(15);
}
for (p2 = 0; p2 < 45; p2++) {
s2.write(p2);
delay(15);
}
}
s2.write(22);
delay(30);
}


See also:
Arduino based Midi Trigger box for analog synths
1001010
from now on you shalt be called miditron
Midified Monotron first track
robots
1001010
from now on you shalt be called miditron
Midified Monotron first track
robots
